下载mujoco200:https://www.roboti.us/download/mujoco200_linux.zip
秘钥:https://www.roboti.us/file/mjkey.txt
licience分别放在./mujoco和./mujoco/mujoco200/bin目录下
wget https://www.roboti.us/file/mjkey.txt
wget https://www.roboti.us/download/mujoco200_linux.zip
unzip mujoco200_linux.zip
mv mujoco200_linux mujoco200
mkdir ~/.mujoco
cp mujoco200 ~/.mujoco/
cp mjkey.txt ~/.mujoco/
cp mjkey.txt ~/.mujoco/mujoco200/bin
安装mujoco_py : pip install mujoco_py=2.0.2.8(python==3.6)
测试
安装过程可能出现Cython,直接用命令重新安装即可: pip install Cython=3.0.0a10
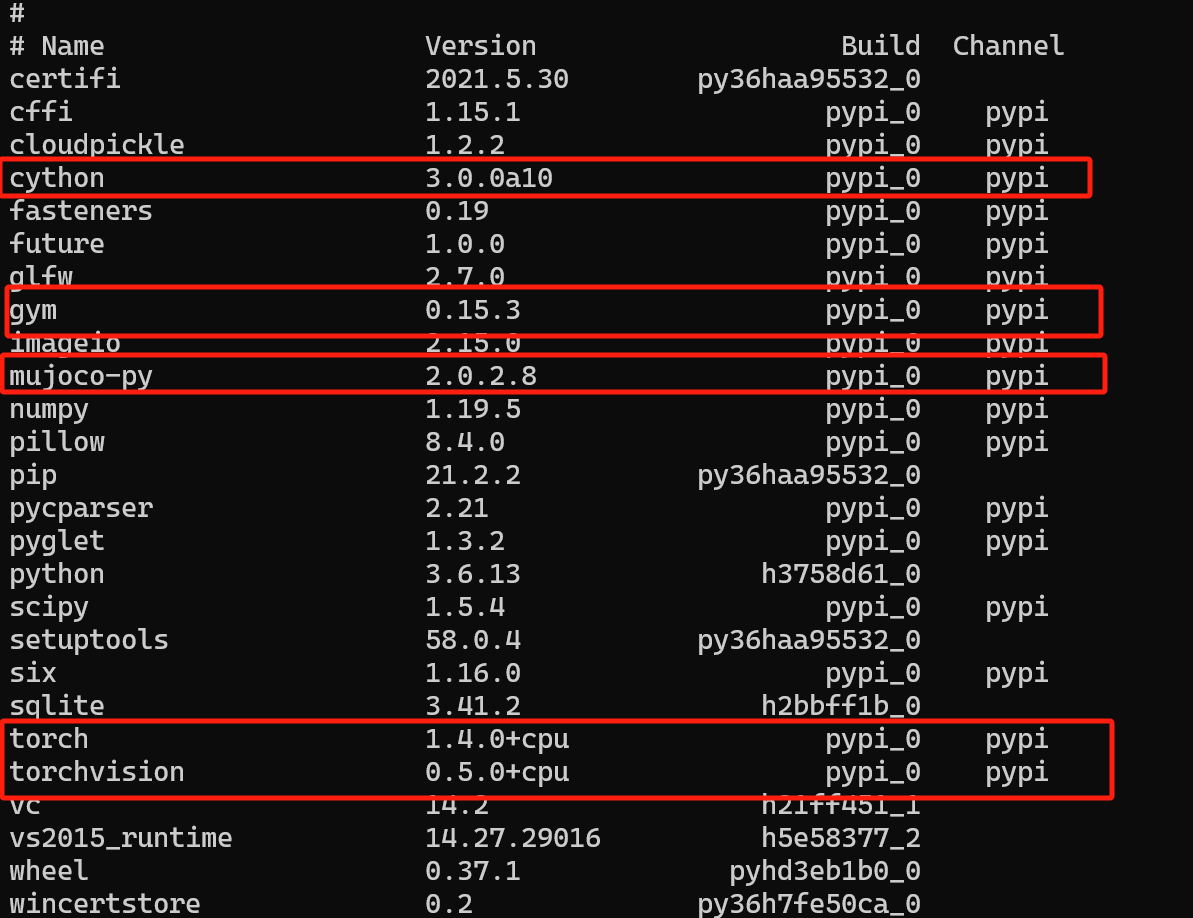
总结起来:
conda create -n mujoco python=3.6
pip install mujoco_py=2.0.2.8
pip install gym==0.15.3
pip install mujoco_py==2.0.2.8
pip install torch==1.4.0+cpu torchvision==0.5.0+cpu -f https://download.pytorch.org/whl/torch_stable.html
pip install tensorboardX
pip install seaborn
pip install Cython==3.0.0a10
上述为安装过程,前提是mujoco200的安装包在~/目录下,这个网上教程特别多
可能出现的问题:
系列一、https://blog.csdn.net/weixin_44420419/article/details/116231500
系列二、https://blog.csdn.net/weixin_44548214/article/details/115580006