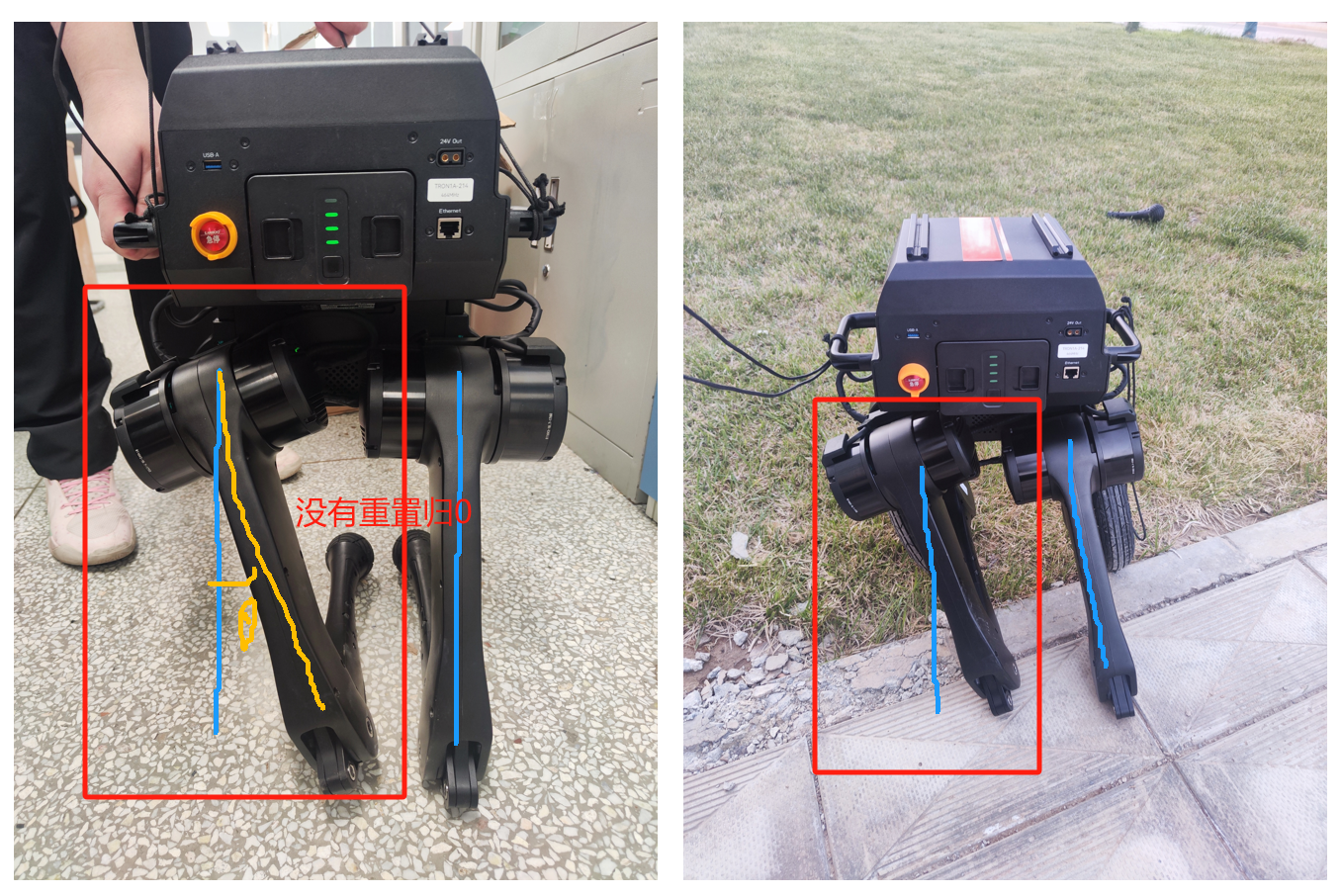
【原因】: 重置状态的时候双脚为离开地面,导致重置初始化失败, 结果就是: 腿脚开始乱弹,没有控制好节奏 【解决方法】:使用L1+R1重置的时候一定要让机器人离开地面,也就是双足不要截图地面,不然导致归0 失败,单脚是外的,那肯定就站不起来了(希望后期可以依靠算法调整,那么开始不是0 ,也可以良好学习)