LeonShangguan
从stable-baseline3的源代码来看主要是
if entropy is not None:
entropy_loss = -th.mean(entropy)
进一步找代码可以看到,实际上返回的entropy是
distribution = self._get_action_dist_from_latent(latent_pi, latent_sde)
return distribution.entropy()
注意,其中的latent_pi和latent_sde是指:
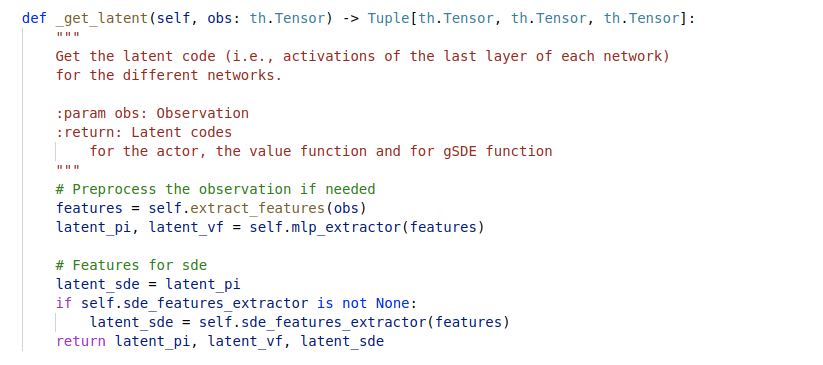
也就是两个变量之间的熵
def _get_action_dist_from_latent(self, latent_pi: th.Tensor, latent_sde: Optional[th.Tensor] = None) -> Distribution:
"""
Retrieve action distribution given the latent codes.
:param latent_pi: Latent code for the actor
:param latent_sde: Latent code for the gSDE exploration function
:return: Action distribution
"""
mean_actions = self.action_net(latent_pi)
if isinstance(self.action_dist, DiagGaussianDistribution):
return self.action_dist.proba_distribution(mean_actions, self.log_std)
elif isinstance(self.action_dist, CategoricalDistribution):
# Here mean_actions are the logits before the softmax
return self.action_dist.proba_distribution(action_logits=mean_actions)
elif isinstance(self.action_dist, MultiCategoricalDistribution):
# Here mean_actions are the flattened logits
return self.action_dist.proba_distribution(action_logits=mean_actions)
elif isinstance(self.action_dist, BernoulliDistribution):
# Here mean_actions are the logits (before rounding to get the binary actions)
return self.action_dist.proba_distribution(action_logits=mean_actions)
elif isinstance(self.action_dist, StateDependentNoiseDistribution):
return self.action_dist.proba_distribution(mean_actions, self.log_std, latent_sde)
else:
raise ValueError("Invalid action distribution")